Bits and Pieces for Approximate Spatial Mapping
K. A. Flagg
26 September 2019
\[
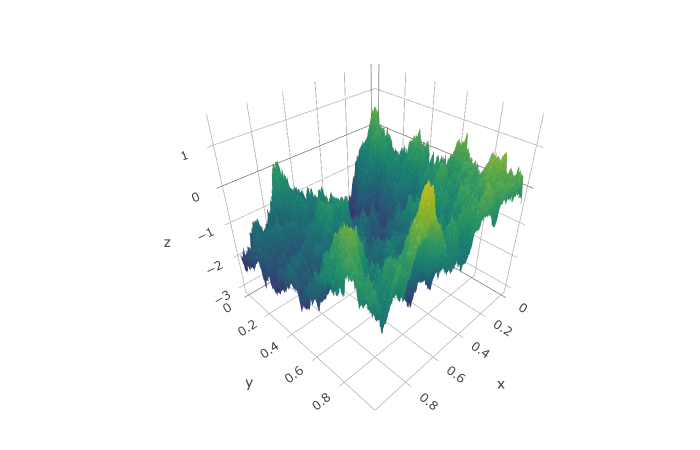
(\kappa^{2} - \Delta)^{\alpha / 2} (\tau Z(\mathbf{s})) = W(\mathbf{s})
\]
\[
(\kappa^{2} - \Delta)^{\alpha / 2} (\tau Z(\mathbf{s})) = W(\mathbf{s})
\]



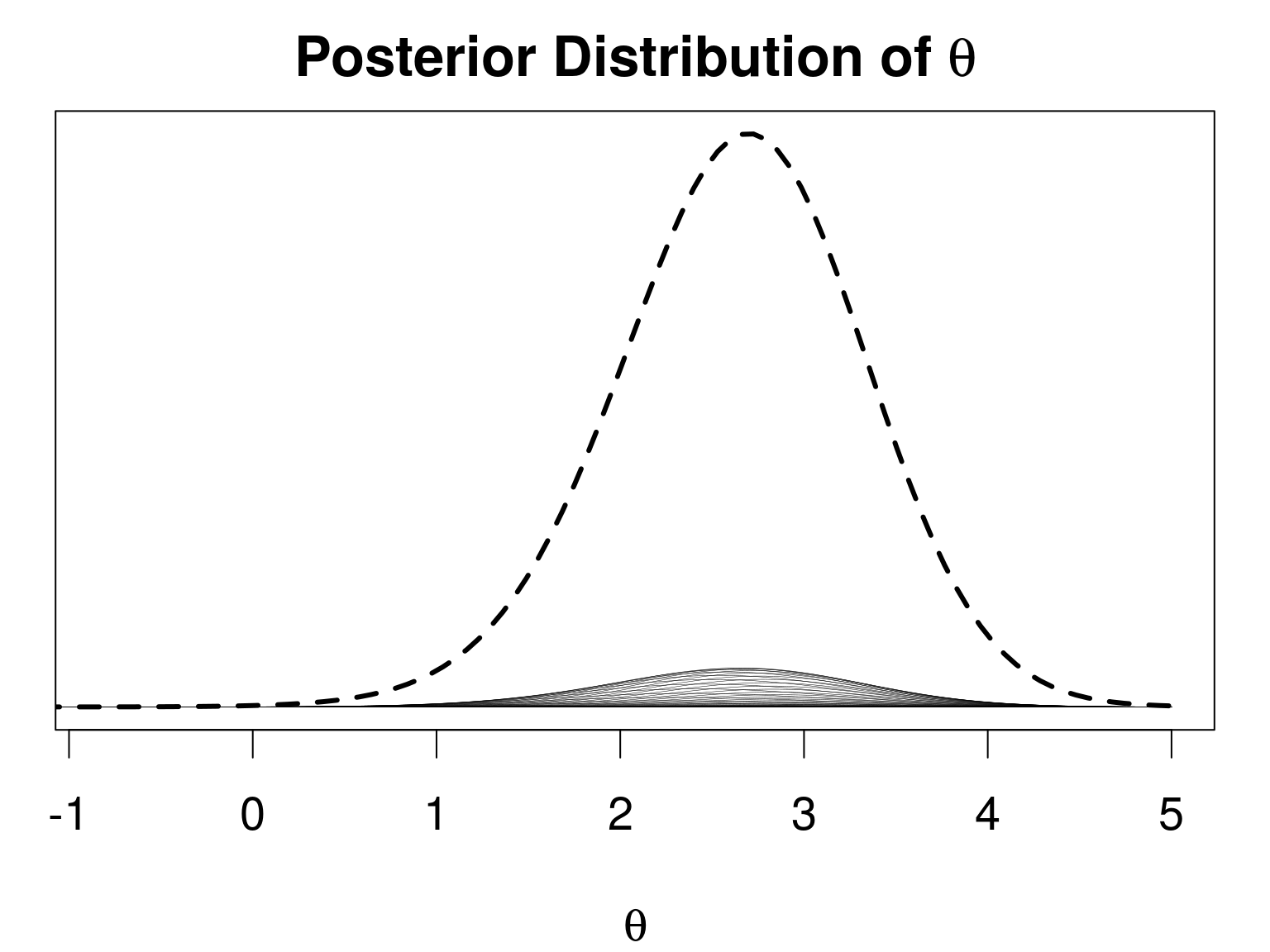
- Priors: \(\mu_{0} = -3\), \(\sigma_{0}^{2} = 4\), \(a = 1.6\), \(b = 0.4\)
- 30 observed points

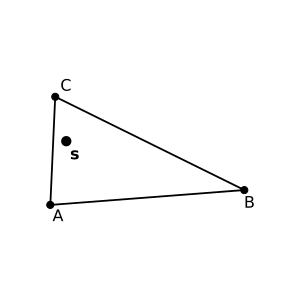
\(\phantom{x + y + z = 1}\qquad x + y + z = 1\)
 →
→
\[ f(\mathbf{s}) \approx \alpha f(1, 0, 0) + \beta f(0, 1, 0) + \gamma f(0, 0, 1) \]